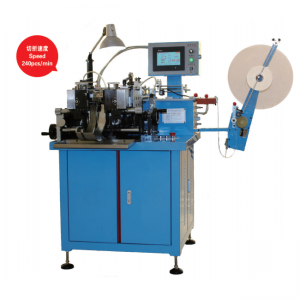

EXILIM Gyratorius Press
SummusSpeedGyratorius Press (ShaftlessPnuperFitting)
Technical Data principalis
Apparatus directio a sinistra ad dextram
Print colores 6-10 COLO COLUI CULTUM
Maximilianus.Telae latitudo 1000 mm
Maximilianus.apparatus celeritas 150 m/min (¢150mm lamella cylindrica)
Maximilianus.Print celeritas 130 m/min (¢130mm lamella cylindrica)
Subcriptio accurate ± 0.1㎜(auto adjust systema
Unwind reel dia 650㎜
Rewind reel dia 650㎜
Tensio range 3-30㎏ (plenum onus)
Accuratio tensio ± 0.3㎏ (latitudo accuratio)
Paper core dia¢76㎜ 92㎜
Aeris fons 0.6 MPa
Doctor chorus ± 5
Siccatio electricity
Principalis potentia motoria 11.0 KW
Totalis apparatus potentiae 100.00 KW
Altiore dimensionibus 14950㎜ 2600㎜×2700㎜
Apparatus pondus (XI) KGS
Substratum
PVDC 35~60um
PET 12~60um
OPP 20~60um
BOPP 20~60um
PE 30~100um
NY 12~50um
CPP 20~60um
Compositum film 15~60um
Et ibi proprium amet
************************************************** ****************
Unwind Unit
Structure
1. inaedificata duplicem locum in gyrum turriculam
2. Duplex tela explicare turbabuntur independenter et active
3. YASKAWA vector moderatoris ad sui iuris tradendi systema adhibetur
4. SALTATIO: Tensio detector systema et SALTATIO tensionis constantis systematis
5. Prope-loop tensio imperium
6. Automatic systema mutans turbabit terrorem admonens artificem ad mutandum turbationem
Specification
1. Maximilianus.paper core latitudine 94mm
2. Maximilianus.unwind reel 600 mm
3. Unwind motor AC4KW+ENCODER+FAN (AC4KW cum 4KW vector controller ,YASKAWA)
l gyrum turris Mobilitate I r / min
l tensio range III 30kg
l Tension accurate ± 0.3kg
Features
1. Nonstop mutantur turbabuntur in altum efficientiam servabit tempus tuum
2. Synchro.Mutatio reel, contentio constans, humilis vastitas
3. Activa explicatio ab AC vectore motore regitur et modicam tensionem moderatur et constantem output facit, quotiens in apede vel in alta celeritate
4. Tensio cylindrici detectora tensionis inferioris friction aeris, tensio cito et exacte adaptari potest.
5. Turris gyratoria statim potest gyrari et collocare;in casu de subitis perficientur potest excludit
6. Cutter positione laborat regularis, et ad modum machinae sistendi claudetur
************************************************** ****************
Infeed Unit
Structure
1. Ferro cylindro ad flexibile cylindro
2. Ferri cylindrus est potentia, quae motore sui iuris agitatur
3. AC2.2KW: Potestas ferri cylindri est ex YASKAWA AC 2.2kw vector controller
4. Flexibile cylindrus sursum/descendens et pressus commensurationem perficiuntur a componentibus pneumaticis
5. High tensio prope sensitivo imperium
6. Tension SALTATIO cylindrus cylindrus arcto-loop tensio imperium iungit
Specification
1. Ferro cylindro 125㎜
2. Flexibile cylindro¢100㎜
3. Chemigum litus (A) 65~70°
4. tensio pone 3~30kg
5. Tensio accuratio ± 0.3kg
6. Coegi motor AC2.2KW+ENCONDER+FAN (cum AC2.2kw vector controller, YASKAWA)
7. Maximilianus .Pressura flexibilium cylindro 300kg
Feature
1. Ferro cylindro flexibile pro certo sectionis tensio diversificatur
2. Tensio Close-loop control control tensio constantem producet print
3. Flexibile cylindrus sursum/descendens nexus cum motore principali, qui a centrali moderatore perficitur
4. Tension control at easy operation links with the main motor
5. Independentes unitatis frame ad altum accurate institutionem
************************************************** ****************
Print Unit
Structure
1. Cylindrus rotundus decet et lateralem institutionem laminae cylindrici adaequari possunt ad positionem initialem eorundem identicam confirmandam.
2. Integra impressio cylindro, facilis ad mutationem
3. Tunc impressio cylindrus sursum/descendens speciem brachii saltatoris adoptat quae minimum mutare potest interretialem.
4. Impressio cylindri sunt in pressione in ordine et pressione simul.
5. Patefacio-type,automatic reddens atramentum manuale atramentum sursum/in
6. Medicus pneumaticus up/down tres dimensiones medicus temperatio manu magni rotae
7. Medicus oscillans et frequentia oscillans proportionem cum currendo motori facit
8. Potens gearbox cum pressione pneumatica integrat systema;oleum immersionem gearbox sigillum habet compages
Specification
1. Cylindrus longitudo 650-1000mm
2. impressio cylindro¢120 mm ternarium Flexilis (litoris: A)75°± 2°)
3. Maximilianus.Impressio 500 kgs
4. doctor pressura 10-150 kgs
Features
1. Compensatio cochleae pilae subtilis pro exacto et flexibili colore mandare regitur
2. Est instructa cum exaltatione vivorum, quae impressionem cylindro clausam ad modum machinae stop
3. Airing systema cylindricum vitabit apparentem dotiunculam sordidam
************************************************** ****************
Drying Unit
Structure
1. Pneumatica clibano aperta / proxima duce rail
2. Independent remittit ratio color color
3. Intelligens constantem temperatus imperium
4. Sigillum caloris conservatio caloris clibani potest secundo adhiberi
5. Longa et plana aer nozzles
6. Electric calefactio
Specification
1. Tela longitudo in cucullo 1400 mm (in 1600 mm octavo colore)
2. Aeris nozzles VII PCs
3. Aeris celeritatem VII m / s *
4. Air palimpsesto relata 0-50%
5. Temp.Imperium accurate ± 2℃
6. Calefaciens vim pro unaquaque unitate 18.5 kw
7. Maximilianus .clibanus temperatus 80℃ (indoor 20℃)
8. Maximilianus.Airing volumen 2800 m3/h
9. CERAULA potentia 1.1 KW/unit
Features
1. Air palimpsesto relata servabit in industria fons
2. Plures modi aeriae faciunt totam telam aerem cyclonea siccantia ab intus ad superficiem et nulla bulla producta
3. Automatica constans temperatus proderit singulis coloribus print
4. Magnus aeris fluxus faciet low-temp summus celeritas aeris siccitate
5. Pressio negativa intus designatus aer oven calidus non inflabitur ad superficiem lamellae cylindrici et cylindri non siccabitur nec deserta solvendo.
6. Calefaciens tubus facile mutari potest
7. Systema calefactionis lateris laicorum, caligarum mollis machinam coniungit cum systemate calefactionis ad resonantiae vitandam.
8. Refrigerationem fan 0.55 kw (unaquaeque unitas)
************************************************** ****************
Outfeed Unit
Structure
1. A ferro cylindro ad flexibile cylindro
2. cylindrus chalybs est potentia cylindri, quae ab motore independens agitatur
3. YASKAWA vector moderatoris ratio adhibetur in tradendo independens components
4. High sensitive close-loop tensio control system
5. Tensio saltatio cylindrus iungit artum imperium et reactionem signa mittuntur ab potentiometro lineari
Specification
1. Ferro volvunt 125mm
2. Flexibile cylindro¢120mm (litus chemigum (A) 65~70°)
3 Tensionem paro 3~30kg
4. Tensio accuratio ± 0.3kg
5. Coegi motor AC2.2KW+ENCONDER+FAN (with AC2.2kw, YASKAWA vector controller)
Feature
1. Ferro cylindro ad tensio cylindro flexibile certissimum sectionem distinguitur
2. Tensio inpendens prope-loop control tensionem constantem imprimet
3. Tension control at easy operation links with the main motor
4. Independentes unitas-fractus in altum accurate institutionem
************************************************** ****************
Rewind Unit
Structure
1. inaedificata duplicem locum in gyrum turriculam
2. Duplex tela rewind independenter et active
3. YASKAWA vector moderatoris ad sui iuris tradendi systema adhibetur
4. Tensio deprehendendi systema et saltationis systema tensio stabilis
5. Prope-loop tensio imperium
6. Turris gyratoria potest rotari situ mutationem ac automatice collocare
7. Tensio et extensio extensio libere in Sinica contra machinationem humanam exponi potest
Specification
1. Maximilianus.Paper core width 1050mm
2. Maximilianus.Reel dia.600mm
3. Rewind motor AC4KW+ENCODER+FAN (YASKAWA 4KW vector controller)
4. Rewind tensio attenuatio 0~100%
5. Gyratorius turris celeritatem I r / min
6. tensio range 3~30kg
7. Tensio accuratio ± 0.3kg
Feature
1. Nemo-subsisto mutantur turbabuntur in altum efficientiam et tempus salutaris
2. Synchro changing turbabuntur in constanti contentione humilis vastum
3. AC motor rewinding controllata nulla tensio imperium complet et constantem facit output quotiens ad low celeritate vel celeritate magno
4. Minimum-friction caeli cylindrici tensio adhibetur ad vel altum celeritatem
5. Turris gyratoria gyrari potest et automatice locare
6. Cutter statum laboris regularis habet et ad modum machinae sistendi claudi potest
7. Tensio functionis attenuationis praestare potest gradum emissiones in extra idem ac sine core specie
************************************************** ****************
Eculeo And Web Travel
Structure
1. Artus in alta vi humilis accentus fit of stannum ferrum
Specification
1. Pars-artus crassitudine LXX mm
2. distantia inter duas turmas 1-1.4m *
3. dux scutulis¢70 mm ¢80 mm ¢100 mm(Aliquam dynamicam usque ad gradus 2.5 et stabilis statera usque ad II g)
4. Rector cylindro longitudinem ML mm
5. Thread gradus ducis cylindro 30 mm
Feature
1. Omnes tabulae bis eliminatae sunt accentus internae pro cautione machina currens stabilis
2. Tabulae praecise ab importata prioritate processit ad locum accurate praestandum
3. Rector umbilicus bene dispositus est ad stateram currentem praestandam
************************************************** ****************
Principalis Transmissio Unit
Structure
1. principalis motor tradet potestatem unicuique unitatis per communem hastilem
2. Coniungens gearbox et alias divortia flexibilitate
3. Pelagus motor habet sui iuris fundum laminam et deminutionem calces
Specification
1. Motor potentia AC11KW+ENCODER+FAN (cum YASKAWA 11KW vector controller)
Feature
1. low-celeritate plena onus satus sursum
2. Lorem accelerationis
3. Praecipua transmissio aliorumque motorum integraliter reguntur et agunt pedetentim cum tota machina
************************************************** ****************
Tension Control
1. Quattuor sectionem ad coordinationem imperium
2. High accurate tensio control,acceleratio/ retardatio tensio non afficit
************************************************** ****************
Ratio accendendi
LED
************************************************** ****************
Computatrum mauris System
Exemplar:Wuhan Brand
************************************************** ****************
Air Duct System
Aquae removentes et Filtra in unaquaque unitate ascendentes et punctum componentium pneumaticum centralizatum
************************************************** ****************
Anti-Static System
Static Peniculus
************************************************** ****************
Apparatus Annexos
Instrumentum rhoncus posuere I
Web inspectionem systema video (Wuhan) 1 set
************************************************** ****************
Machina Main Parts Brand
1. Tensio imperium ratio Iaponia
2. PLC Panasonic,Japan
3. Unwind motor AC4KW+ENCODER+FAN (ABB) (cum YASKAWA 4KW vector controller)
4. Praecipua motor AC11KW+ENCODER+FAN(ABB) (cum YASKAWA 11KW vector controller)
5. Rewind motor AC4KW+ENCODER+FAN(ABB) (cum YASKAWA 4KW vector controller)
6. Infeed motor AC2.2KW+ENCODER+FAN (cum YASKAWA 2.2KW vector controller)
7. Outfeed motor AC2.2KW+ENCODER+FAN (cum YASKAWA 2.2KW vector controller)
8. Humanum Machina interface Weilun, Taiwan
9. Minimum friction aeris cylindrici Fuji Kura,Japan
10. Subtilitas aeris valvae spiraculi CKD
Pneumaticum 11. Main components Airtac
12. Main gestus American
13. Rector cylindro 70mm 80mm 100mm
14. tium Belgicum Schneider
************************************************** ****************
Dicta
Machina producti hi-technicae reservamus ius parametri et machinae structurae mutandae, pendens secundum consilium requisita in umbraticis ut tibi melius apparatum praebeat.